Dynamic Locomotion
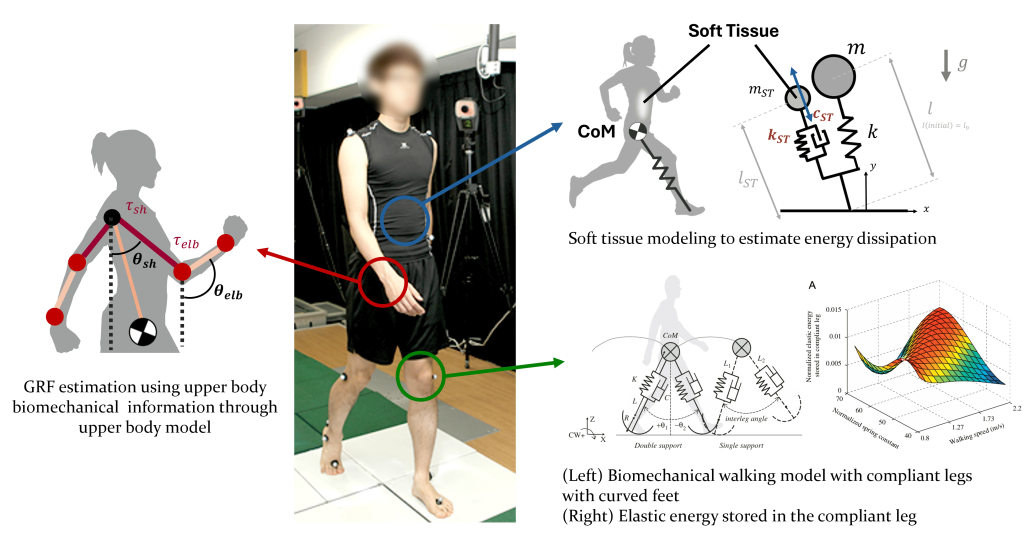
Human walking is achieved through complex control of a multi-joint, multi-actuator system, but it can be simplified and understood as the oscillatory motion of the body’s center of mass using the SLIP (Spring Loaded Inverted Pendulum) model. In this laboratory, we aim to analyze and replicate actual human gait by applying dynamics-vibration modeling and AI based on such walking models.
- Compliant Legged Bipedal Model & Oscillatory Characteristics
- Kinematic Data Estimation based SLIP model
- Ground Reaction Force Estimation Using Upper body Modeling
- Improvement of SLIP based running model using soft tissue modeling
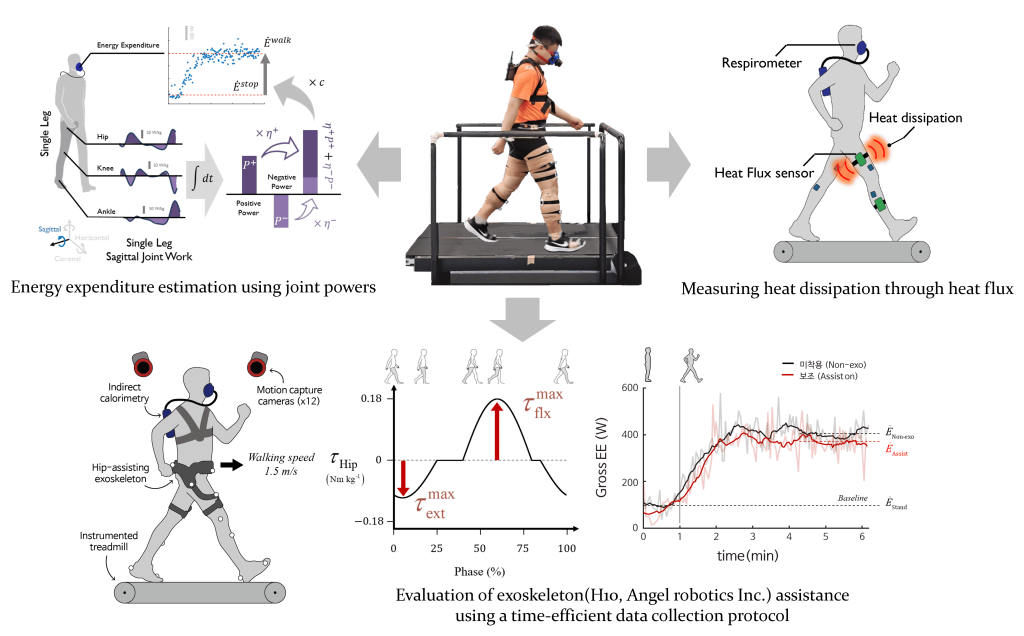
Energy Expenditure
Energy expenditure determined by movement characteristics is used as a quantitative metric for sports performance and the evaluation of wearable assistive devices. However, its application is limited due to the high cost and variability of respiration gas-based measurement methods. To address this, our laboratory is conducting research on accurately estimating energy expenditure by predicting it using biomechanical information and compensating for variability through heat loss analysis.
- Energy Expenditure Estimation using Multi-joint Mechanical Work
- Evaluation of Exoskeleton(H10, Angel robotics Inc.) Assistance Using a Time-Efficient Data Collection Protocol
- Variability of Energy expenditure by Heat loss